Modélisation et Simulation
Un implant cochléaire robotisé prolonge le geste du chirurgien
Date:
Date:
Mis à jour le 16/10/2024
Certaines opérations chirurgicales nécessitent une précision extrême, et dépendent en grande partie de l’expérience et de l’habileté de la personne à l’œuvre. C’est le cas de la pose des implants cochléaires : des prothèses utilisées dans des cas de surdité profonde. La cochlée, petit organe de l’oreille interne en forme de spirale, transmet les sons au nerf auditif grâce aux cils dont elle est tapissée.
L’implant cochléaire stimule directement le nerf auditif par des impulsions électriques. Les personnes qui en bénéficient peuvent espérer obtenir une compréhension normale de la parole. À condition que tout se passe comme prévu ! En effet, l’implant doit être poussé à l’intérieur de la cochlée, sans possibilité de vérifier le bon déroulement du procédé. Cela en fait une opération très complexe, où il arrive que la paroi de l’organe soit abîmée.
Pour standardiser cette procédure, des robots d’assistance ont été développés. S’ils ont permis d’améliorer les résultats, ils n’empêchent pas le frottement des implants lors de l’insertion. « Des simulations numériques de l’opération menées par notre équipe-projet, Defrost, nous ont permis de comprendre qu’une solution à ce problème était de rendre l’implant actif, afin de pouvoir le courber pendant l’insertion », explique Gang Zheng, responsable de l’équipe au Centre Inria de l’Université de Lille.
De ce constat est né le PRCE (Projet de recherche collaborative - entreprise) Robocop, visant à mettre au point un implant cochléaire robotisé. Porté par Inria, et financé par l’Agence nationale de la recherche (ANR), il rassemble le Laboratoire de physicochimie des polymères et des interfaces (LPPI), l’Institut d'électronique, de microélectronique et de nanotechnologie (IEMN), l’Inserm et l’entreprise spécialiste des prothèses auditives Oticon Medical, depuis rachetée par le leader mondial Cochlear.
Verbatim
Ce type de projet est important pour nous, industriel, car il nous permet d’innover avec des experts dans leurs domaines de recherche.
Auteur
Poste
Ingénieur de recherche principal chez Oticon Medical
Pour rendre l’implant cochléaire mobile, les chercheurs y ont intégré un actionneur : ce composant, lorsqu’il est mis sous tension, permet de courber le dispositif. Mais pour parvenir à un prototype fonctionnel, il leur a fallu surmonter de nombreux défis scientifiques : quels matériaux utiliser ? Comment assurer la finesse de l’implant ? Comment prévoir son comportement et le contrôler ?
« Depuis une vingtaine d’années, nous travaillons sur des polymères électrostimulables, dont nous maîtrisons les procédés de fabrication », retrace Cédric Plesse, professeur des universités et directeur adjoint du LPPI. « En raison de leur sensibilité à des tensions de l’ordre du volt, ils étaient adaptés à cet usage. » Mais ces matériaux ont été développés pour la robotique, sans restriction quant à leur composition chimique. Or, un implant doit rester dans le corps plusieurs dizaines d’années, en toute sécurité. « Nous avons donc dû revoir chacun des constituants pour nous assurer qu’aucun ne soit toxique pour les cellules en cas de dégradation », détaille le chercheur.
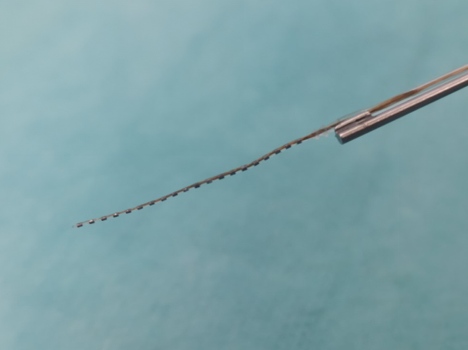
Autre difficulté : l’actionneur doit être suffisamment fin. Avec les équipes d’Éric Cattan, professeur des universités et chercheur à l’IEMN, les chimistes sont parvenus à la conception d’un composant formé de deux couches de polymères séparées par un liquide ionique. Les électroniciens ont ajouté les connexions pour assurer la commande du dispositif, puis ont intégré l’actionneur au faisceau d’électrodes qui constitue l’implant.
« Pour limiter son épaisseur, nous avons également remplacé les électrodes classiques, des petites bagues métalliques, par des électrodes en couches minces d’un micromètre, situées en surface de l’implant, qui augmentent la surface de contact avec la paroi de la cochlée », complète Éric Cattan. « Avec une épaisseur totale de 20 micromètres, moins qu’un cheveu, nous avons rendu l’implant beaucoup plus souple. » L’objectif étant, à terme, de pouvoir fabriquer ce nouveau dispositif sur des lignes de production classiques, ces étapes de conception ont été réalisées en concertation avec Oticon Medical.
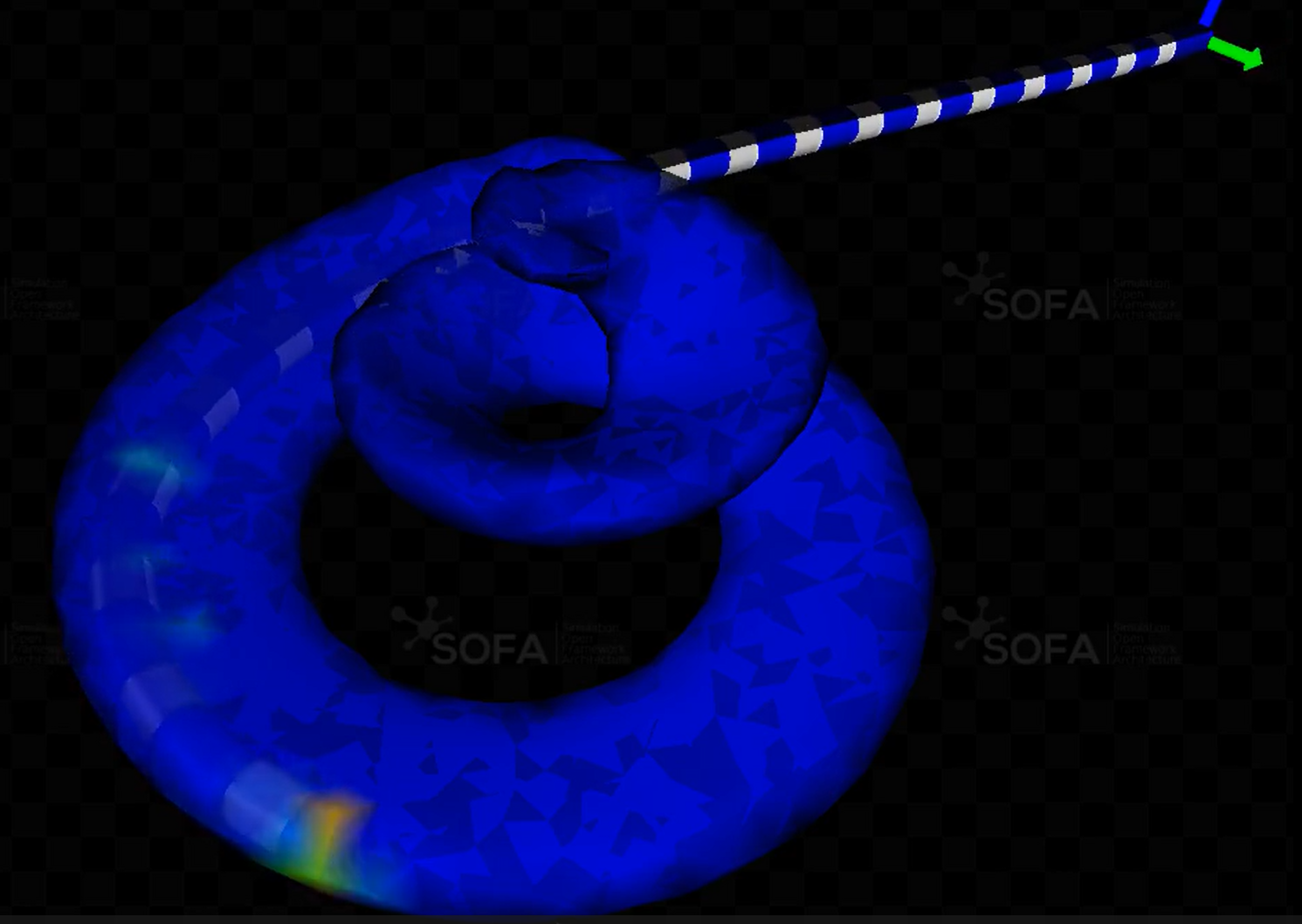
Mais comment anticiper le bon fonctionnement de cet implant d’un nouveau genre ? Avant même la fabrication de prototypes, il faut faire appel à la modélisation et à la simulation numérique. C’est là qu’entre en jeu l’équipe-projet Inria Defrost (commune au laboratoire CRIStAL et à Centrale Lille), spécialiste de la robotique souple. « Comment le dispositif va-t-il se déformer en fonction de la tension électrique appliquée ? Quel sera l’effet des frottements contre la paroi de la cochlée ? », interroge Gang Zheng.
Pour répondre à ces questions, les scientifiques d’Inria ont procédé par étapes. « Nous sommes partis de la modélisation des implants passifs, auxquels nous avons ajouté l’actionneur, avant d’introduire les interactions avec la cochlée », énumère le chercheur. L’équipe a innové par la méthode numérique utilisée : alors que leurs travaux précédents s’appuyaient sur la méthode des éléments finis, lourde en termes de calculs, ils ont allégé le modèle grâce à la théorie des poutres de Cosserat. Jamais appliquée dans ce domaine auparavant, elle consiste notamment à décrire les mouvements dans un référentiel différent.
« Ce modèle permet une analyse détaillée des relations géométriques complexes, forces et moments aux points de contact », décrit Lingxiao Xun, qui en a fait l’objet de sa thèse chez Defrost. En réduisant le temps de calcul nécessaire sans perdre en exactitude, l’équipe a rendu possible la simulation en temps réel des déformations de l’implant, causées par l’actionneur comme par les frottements sur la paroi. À l’avenir, cette avancée devrait permettre de donner au chirurgien un retour visuel sur ses gestes, par l’estimation en direct de la position de l’implant dans la cochlée pendant l’opération.
Afin de reproduire au mieux les phénomènes réels, un modèle numérique doit être alimenté par des mesures. « En amont de la modélisation, nous avons transmis à Defrost les paramètres connus des matériaux utilisés », rapporte Cédric Plesse, du LPPI. Mais pour certaines variables, les scientifiques ont dû s’appuyer sur les tests réalisés avec les premiers prototypes. « Le chirurgien Yann Nguyen, professeur des universités et chercheur à l’Inserm, a réalisé plusieurs insertions avec un robot dans une reproduction de cochlée fournie par Oticon Medical », décrit Gang Zheng. « En ajoutant un capteur de force au système, nous avons collecté des données à réinjecter dans notre modèle. »
Vient ensuite la mise au point du système de contrôle du robot et de l’implant. Le capteur de force mesure le frottement contre la paroi de la cochlée : si celui-ci est trop important, le robot corrige l’angle d’insertion pour réduire la résistance, et donc le risque d’abîmer l’organe. Puis, lorsque la simulation de trajectoire indique que l’implant atteint la courbure de la cochlée, le système enclenche sa courbure afin de compléter l’insertion. Plusieurs tests ont été réalisés.
Image
Verbatim
Nos simulations reproduisent bien le comportement réel de l’implant, qui a pu être inséré entièrement à plusieurs reprises
Auteur
Poste
Responsable de l'équipe-projet Defrost
Le projet, qui se termine en septembre 2024, a permis des avancées significatives. Les premiers essais cliniques d’un implant de ce type nécessiteront encore plusieurs années de développement, mais les scientifiques ont déjà identifié plusieurs pistes pour perfectionner le système. « Plutôt que de coller l’actionneur sur l’implant, comme nous l’avons fait ici, nous pourrions le faire croître directement sur le faisceau d’électrodes », illustre Éric Cattan. « Nous avons réussi à développer pour cela des polymères stables, et qui faciliteraient la biocompatibilité », ajoute Cédric Plesse.
La modélisation devra elle-aussi être perfectionnée, notamment avec la prise en compte des organes proches de la cochlée, comme le nerf facial. « De plus, nous pourrions améliorer la précision de l’opération en prenant en compte la forme de la cochlée spécifique à chaque patient », prévoit Gang Zheng. « Pour cela, il faudra intégrer au modèle des mesures 3D individuelles obtenues par tomographie. » Ces travaux seront menés dans le cadre d’un nouveau projet, ACCESS, financé par l’ANR et porté par l’IEMN.
Au-delà de l’implant cochléaire, les travaux réalisés pourraient à l’avenir être transposés à d’autres usages, comme l’insertion d’un cathéter dans une veine, ou la neurochirurgie. C’est donc une nouvelle page de la robotique chirurgicale qui s’ouvre avec la conclusion de Robocop.