Intelligence artificielle
Partenariats industriels : aller au-devant des besoins
Date:

L’équipe-projet Larsen d’Inria participe au projet européen Andy, dont l’un des objectifs est de reconnaître en temps réel les mauvaises postures ou mouvements d’opérateurs selon des critères ergonomiques. Afin de constituer une base de données, treize volontaires équipés de capteurs inertiels ont réalisé différentes séquences de tâches, typiques de l’industrie manufacturière, soit cinq heures d’enregistrement. Plusieurs annotateurs ont segmenté et évalué ces séquences selon des critères ergonomiques, en fonction de la posture, de la vitesse d’exécution, du port de charges, de la manipulation d’objets, etc.
Les algorithmes de machine learning développés à cette occasion automatisent l’évaluation ergonomique classique par fiches manuelles, et permettent de détecter les mauvais gestes en temps réel. L’estimation en temps réel de l’ergonomie et la prédiction du mouvement sont alors récupérées par des robots et utilisées par des algorithmes d’IA pour planifier leur gestes collaboratifs et mieux assister les opérateurs humains.

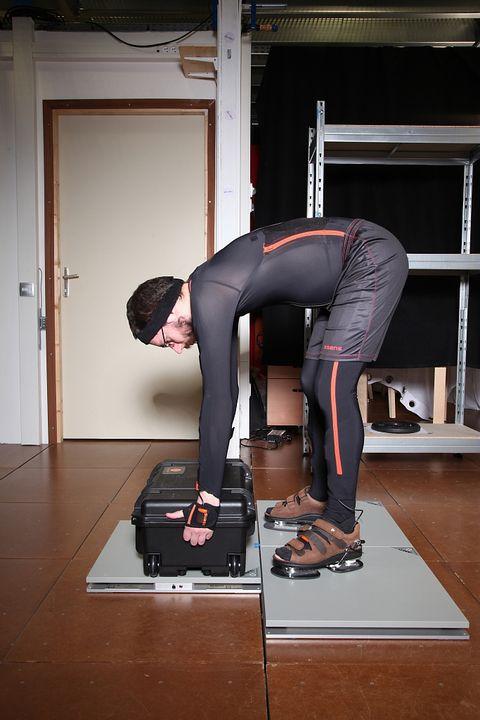
Sur des plates-formes de force et avec des sabots de force pour calculer la pression exercée au sol © Inria / Photo F. Nussbaumer - Signatures
Comment assurer la sécurité d’un opérateur qui travaille avec un cobot tout en évitant que ce cobot s’arrête ? Dans les usines automobiles, c’est une question pressante, car une chaîne de production complète peut ainsi se retrouver bloquée. Elle est au centre d’un projet mené par l’équipe-projet Auctus d’Inria avec PSA.
L’industriel est séduit par la flexibilité et le faible encombrement des cobots. Mais il ne veut pas voir chuter sa productivité. Les chercheurs étudient des stratégies de ralentissement des mouvements du cobot. Ils affinent aussi sa capacité d’observation de l’opérateur, pour anticiper ses gestes et ajuster son comportement en conséquence. Objectif : une coopération cobot-opérateur plus fluide et plus sûre qui ne perturbera pas les cadences de production.



Tous les menuisiers connaissent la « toupie », cette machine-outil indispensable mais dangereuse, à l’origine de nombreux accidents. Pendant leur formation, les apprentis apprennent à l’utiliser sous haute surveillance. Aussi, le Centre de formation des apprentis (CFA) de Blanquefort, près de Bordeaux, s’intéresse de près à une thèse en cours au sein de l’équipe-projet Auctus d’Inria ; elle porte sur une méthodologie de sécurisation de gestes artisanaux avec des cobots.
À titre d’exemple, un robot collaboratif pourrait réagir 20 fois plus vite qu’un humain si une pièce de bois comportant des nœuds était expulsée à grande vitesse. Par ailleurs, son degré d’assistance pourrait être adapté selon la pénibilité de la tâche et l’aisance de l’apprenti.
Nous sommes fiers de servir de site-pilote, et curieux de découvrir ce que la cobotique peut nous apporter. Si les résultats sont probants, nous les partagerons avec le réseau national des CFA.
Philippe Godin, adjoint de direction du CFA de Blanquefort, à propos du texte Menuiserie : un cobot pour sécuriser la toupie
« La cobotique s’invite au CFA du bâtiment et des travaux publics », Marie-Françoise Jay, Sud-Ouest, 05/12/2019
En Auvergne - Rhône-Alpes, le cluster Coboteam, porté par le centre d’innovation Thésame et soutenu par le conseil régional, renforce les liens entre les 500 sociétés de la filière robotique et les équipes-projets Inria. Trois fois par an, Coboteam organise des « matinées robotique » qui réunissent des industriels et des chercheurs. Les premiers découvrent comment collaborer avec un laboratoire, les seconds détectent de nouveaux besoins applicatifs. Autre action, Coboteam anime des tables rondes sur la robotique lors de journées de rencontre proposées par Inria. Ces événements ont abouti au montage de plusieurs projets de R&D. La cobotique, évolution récente et innovante de la robotique, y tient une place prépondérante.