Robotique
Upkie, le robot open source qui ouvre de nouvelles voies de formation et de collaboration
Date:
Date:
Mis à jour le 20/03/2025
En 2019 apparaissaient sur le marché de nouveaux moteurs plus performants, au coût relativement raisonnable. Ces moteurs, plus puissants que les moteurs « brushless » utilisés jusque-là (par exemple dans les drones), mais moins que ceux utilisés dans des robots industriels tels que l’Atlas de Boston Dynamics, ont ouvert la voie à la création de robots d’une taille intermédiaire.
En parallèle, la croissance d’une communauté open hardware et open source a rendu la robotique plus accessible, réduisant alors considérablement les barrières d’entrée pour les passionnés de robotique et offrant aux scientifiques une alternative intéressante aux robots commerciaux, fermés et coûteux, qui limitent l’accès à la compréhension profonde de leur fonctionnement.
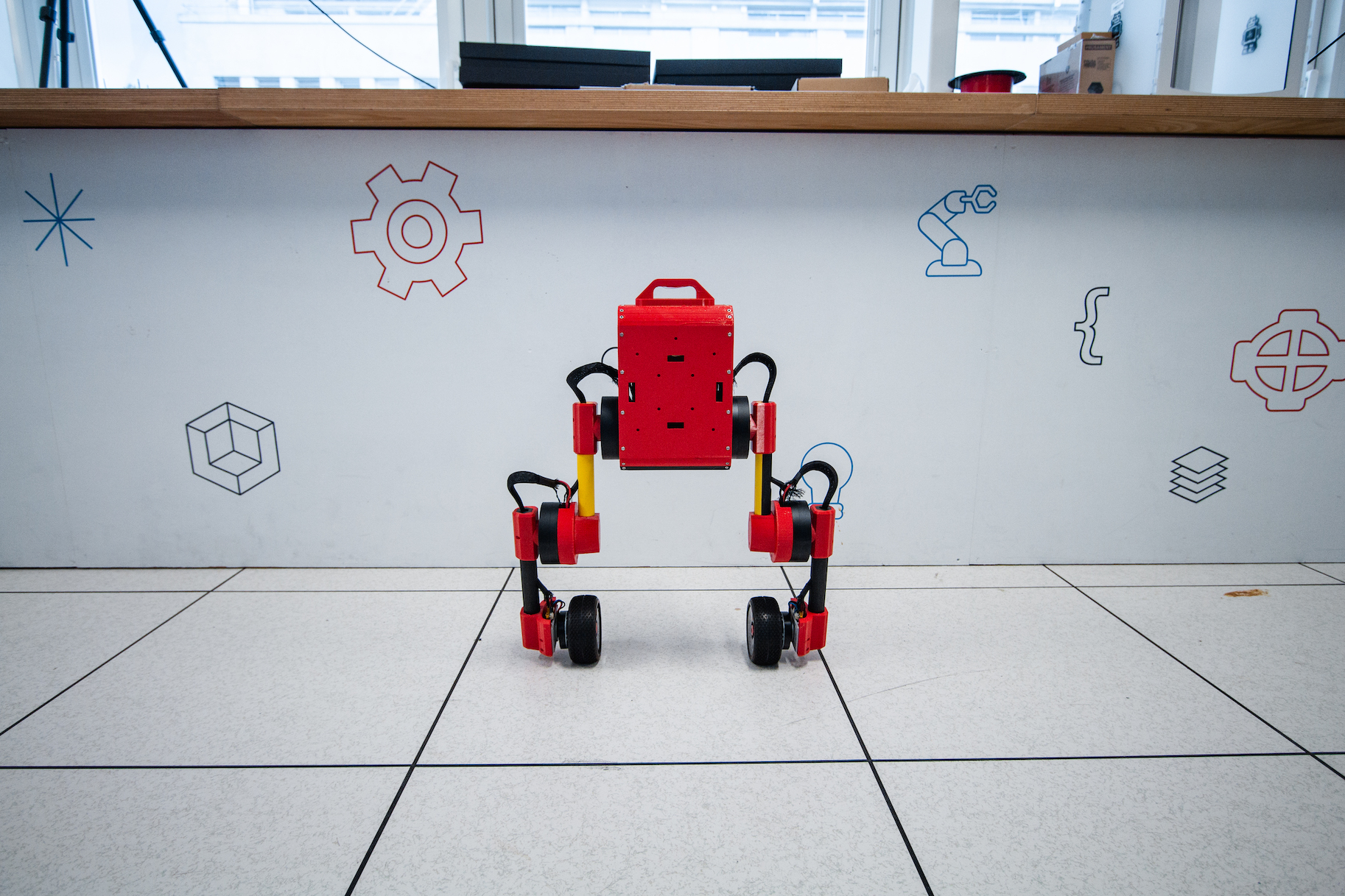
C’est dans ce contexte que Stéphane Caron (équipe-projet WILLOW du Centre Inria de Paris) développe Upkie, un robot de 80 centimètres et 5 kilogrammes entièrement open hardware que tout le monde pourrait construire, étudier et modifier. Conçu pour être assemblé avec des composants disponibles en ligne et des pièces imprimées en 3D, Upkie se déplace sur deux roues et assure sa stabilité en s’appuyant sur des logiciels de robotique open source.
Loin des robots lourds et coûteux que les doctorantes et doctorants manipulaient auparavant, Upkie devient rapidement un support pédagogique idéal pour eux. Les jeunes chercheurs et chercheuses ont en effet entre les mains un robot qu’ils peuvent réellement s’approprier, démonter, reprogrammer, tout en mettant en pratique des algorithmes complexes qu’elles et ils découvrent dans les manuels ou en laboratoire.
Verbatim
Il y a encore quelques années, nous apprenions les algorithmes sur des robots lourds et fragiles. C’était long et nous avions peu d’échantillons. Avec Upkie, la barrière d’entrée est beaucoup plus petite, le robot est plus accessible. Cela nous permet d’appliquer, d’une part, les résultats de notre recherche, mais aussi d’attaquer progressivement des problèmes plus complexes.
Auteur
En commençant par un robot de taille moyenne et de faible complexité (six moteurs), les doctorantes et doctorants peuvent en effet peu à peu se familiariser avec les bases du contrôle de robot bipède avant de passer à des systèmes plus complexes, comme des humanoïdes à 30 moteurs.
« Contrairement aux robots commerciaux, nous pouvons aller voir dans le code grâce à l’open source. Nous ne sommes donc jamais bloqués quand il se passe des choses que l’on ne comprend pas. On peut également le casser, les étudiants ne s’en privent d’ailleurs pas ! C’est important pour voir les limites du robot et apprendre à itérer rapidement sur les idées. Mais l’avantage avec ce type de robot c’est que les pièces cassées peuvent être réimprimées en 3D et changées, à moindre coût », ajoute Stéphane Caron.
Le projet, qui continue d'évoluer depuis sa première itération fin 2021, est voué à s’enrichir au fur et à mesure des besoins de la communauté. « Nous travaillons maintenant sur la connexion entre robotique et vision artificielle. Côté matériel, nous avons également des extensions à venir, comme l’ajout de membres supplémentaires pour donner de nouvelles capacités au robot », indique Stéphane Caron.
Outre la formation, un autre aspect est au centre des préoccupations des chercheurs et chercheuses de l’équipe-projet WILLOW pour Upkie : sa reproductibilité.
Traditionnellement, il est en effet difficile de comparer les résultats d’une équipe à une autre, car les robots développés et utilisés sont différents, et les algorithmes souvent testés dans des contextes spécifiques. En permettant à d’autres chercheurs et chercheuses de construire leurs propres versions d’Upkie et de partager leurs résultats, le projet propose des formes de standardisation, permises par l’open source, et donc un cadre commun pour la comparaison des résultats de recherche et des algorithmes.
Verbatim
Un espoir que nous avons avec l’aspect open source et open hardware, c’est que si cela devient vraiment facile de reconstruire le robot, des comparaisons pourront être faites avec le même code et la même base logicielle, permettant de savoir par exemple quels algorithmes sont plus adaptés à quelles tâches.
Auteur
La transparence offerte par l’open source permet aussi aux chercheurset chercheuses de comprendre exactement comment fonctionnent les robots, et d'améliorer les algorithmes sans être limités par des systèmes propriétaires. « Le côté open source doit permettre à tous, industriels, académiques, et particuliers, de garder la compréhension, l’accès à la technologie. Nous voulons contribuer à cet écosystème-là », conclut-il.